接上篇:
- TensorFlow 拆包(一):Session.Run()
- TensorFlow 拆包(二):TF 的数据流模型实现
- TensorFlow 拆包(三):Graph 和 Node
- TensorFlow 拆包(四):Device
- TensorFlow 拆包(五):Distributed
- TensorFlow 拆包(六):RDMA
开始分析性能瓶颈了,本篇记录一下研究 TF 中自带的 Profiling 工具时遇到的几个坑点。
profiler
大概 17 年 5 月左右,/tensorflow/core/ 中新加了一个 profiler 的目录,里面是把原本在 contrib 中的 profiling 工具移过来了,大概正式 release 应该是在 1.6、1.7 里面。
关于生成 profiling 的 context 文件详见 tf.profiler 相关的内容,这里直接开始记录怎么用 tfprof 这个工具。
试了一下 pip 包里面应该是没有单独包含的,需要从源码手动编译:
1 | bazel build //tensorflow/core/profiler |
然后使用也是要从 bazel-bin 的目录中打开:
1 | bazel-bin/tensorflow/core/profiler/profiler --profile_path=xxxxx |
profiler_ui
profiler 的 README 中,示例代码除了 profiler 以外还有个 profiler_ui,基本上是一个类似 tensorboard 的网页前端,方便调用后端的 profiler 进行可视化查看用的。
这里虽然写着暂未开源,但是在 TensorFlow 的 github 总目录里面可以找到一个叫 profiler-ui 的项目,就是那个未完善开源的 ui 版了。
看了下,安装需要用到 go 以及 Google 自家的 pprof 工具,可能是因为耦合的其他部件比较多,所以暂时还没有并入 TF 的主代码中去。不过这里的 Installation 已经足够我们自己装上了。
装 pprof 的时候会有个坑点,CentOS 库中可以找到 gperftools 这个工具,也是 Google 提供的,yum 装上之后可执行文件的名字也叫 pprof !!但是跟这里用到的 pprof 不是一个玩意!!
之后按照示例上的说明:
1 | python ui.py --profile_context_path=xxxx |
即可启用。
在我尝试使用它的时候,距离这个库上一次 git 的更新已经过去 1 个月左右了,不知道是 python 版本还是什么原因,直接运行可能会遇到找不到 server 的路径等等的 bug,直接在 ui.py 里面稍微改一下就好。
Profiling
运行 TF 时保存出来的 profiling 文件包含了大量信息,主要有几个方面:
- scope:应该是 python 层代码中用
tf.name_scope()包起来的视图 - graph:TensorFlow 计算图的视图
- op:把 TensorFlow 计算图再细化一层
- code:Python 代码视图
默认会按列表把所选的视图中的一些信息给输出出来,另外用-output 选项可以指定输出成另外的格式:
1 | tfprof> |
profiler_ui 打开时的第一个页面就是 graph 视图生成的 timeline:
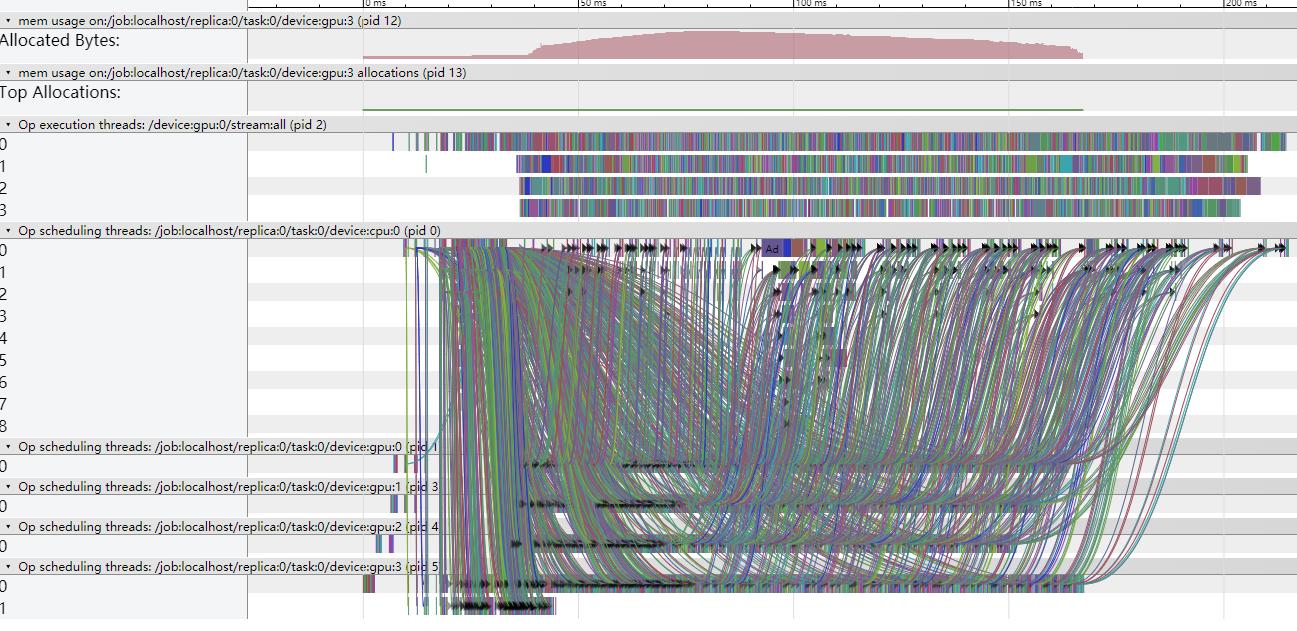
其中包含了计算图中每个 node 在卡上的情况,运行时间、数据流动依赖关系等等。(话说显示的太复杂了,事实上我觉得还是很难看)
然后默认的 scope 视图以及 code 视图得到的 timeline 我也感觉并没有什么用。
code 视图输出成的 pprof 图片倒是还可以看一下,但是感觉用处也不大
所以最后感觉还是不知道该怎么用好这套 profiling 工具
Options
在 tfprof 界面直接回车可以看到默认的选项,然后这里面的内容都是可以改的:
1 | tfprof> |
稍微挑几个写一下:
-max_depth:指定显示前多少个 node(配合下面的 -order_by ?)
-step:profiling 记录的文件可能包含了很多个 step,用这个选项来指定当前分析哪个 step 的信息,默认 -1 是对所有 step 做平均
-order_by:打出来列表的时候,按照什么来排序:
- name:node 的名称
- depth:node 在节点树中的深度
- bytes:占用的内存数
- peak_bytes:占用的峰值内存数
- residual_bytes:计算完成之后,还剩下不释放的内存数
- output_bytes:输出的大小
- micros:node 计算所花费的时间
- accelerator_micros:node 计算所花费的加速卡时间(区别于 CPU 的其他设备)
- cpu_micros:node 计算所花费的 CPU 时间
- params:node 中包含的参数量
- float_ops:node 所需要的浮点运算次数
- occurrence:node 在图中出现的次数
-account_type_regexes:筛选出类型里面带有某些前缀的 node 有多少个
-start_name_regexes:筛选出名字中带某些前缀的 node
-trim_name_regexes:隐藏掉名字中带某些前缀的 node
-show_name_regexes:筛选出名字中带某些字符的 node
-hide_name_regexes:隐藏掉名字中带某些字符的 node
-select:选择视图中的哪些内容(有点像从数据库里面找东西的感觉),输出 timeline 的时候配合这个应该能够得到不同的数据:
- bytes:占用的内存数
- peak_bytes:占用的峰值内存数
- residual_bytes:计算完成之后,还剩下不释放的内存数
- output_bytes:输出的大小
- micros:计算所花费的时间
- accelerator_micros:计算所花费的加速卡时间
- cpu_micros:计算所花费的 CPU 时间
- params: 参数量
- float_ops:浮点运算次数
- occurrence:在计算图中出现的次数
- tensor_value:tensor 数据的值(估计需要配合 checkpoint 用)
- device:op 放在哪个设备上
- op_types:op 类型
- input_shapes:输入的形状
Trace
抛开上面那个目前还没有正式 Release 的 Profiling 接口不说,实际可以用来做分析的是一套生成 trace_file 的 API。
用法也很简单:
1 | options = tf.RunOptions(trace_level=tf.RunOptions.FULL_TRACE) |
在 RunOptions 中设置好追踪的级别,然后作为参数一起参与 Session.run(),最后记录得到的每个 step 的追踪数据通过 run_metadata 的结构返回出来。通过对追踪结果的解析即可生成我们可以理解的图形数据了,这个用的是 chrome 支持的 json 格式,在 chrome 地址栏中输入 chrome://tracing/ 即可很方便地查看,timeline 最后出来的效果跟上面的是一致的。
应该说,前面这个 Profiling 的 API 应该底层封装的也是这套机制。
在 DirectSession 中可以非常容易地找到与 trace_level 相关的代码:
1 | std::unique_ptr<DeviceTracer> tracer; |
其中 DeviceTracer 是一个预留给多种设备来方便进行性能分析的接口,可惜的是目前里面的实现只有 GPU 的,需要依靠 CUDA 提供的 CUPTI 库。所以大概追踪过程中得到的与 CPU 相关的信息应该也是 CUPTI 附带的,如果是纯 CPU 版本的 TensorFlow,CreateDeviceTracer() 直接返回的是一个空指针。
Distributed
由于分布式环境下的 Session 的执行模式与单机情况下有所不同,因而分布式下运行 trace 的工作方式也会有所区别。
MasterSession 中首次执行 PartialRun 时会初始化 PerStepState:
1 | // If this is the first partial run, initialize the PerStepState. |
这里会根据 trace_level 的值来设置一些标记。
下一步,pss 中的内容又会被写到 exec_opts 结构中:
1 | // Collect execution cost stats on a smoothly decreasing frequency. |
这个结构会被封装在 rpc 的 call 中发送给 WorkerService 来处理。
在 Worker 的运行结构中,可以看到这样的代码:
1 | StepStatsCollector* collector = nullptr; |
好吧,StepStatsCollector 都已经创建了,但是可惜后续具体的 GPU tracing 部分还没有往里面完善。
Benchmark
TensorFlow 官方的 Performance 页 和 Benchmarks 页 中给出了官方测性能用的 benchmark 脚本:
基本上把目前 TF 里最高效的 API 都用上了,并且包含了各种常见的多机多卡方案,很值得作为高效的样例脚本来参照。
有个问题是这个库目前没有定期 release,各种更新全都合并到 master 分支里面去了,然后随着 TF 版本的不断更新,它的 master 分支是跟着 TF 的 master 分支走的。
因此要想正常跑最新的 benchmarks,就需要装 tf-nightly-gpu 包或者源码编译一个比较新的 TensorFlow 分支。
简单分析一下这份脚本的结构。
从 tf_cnn_benchmarks.py 这个入口进去之后,核心的执行流程在 benchmark_cnn.py 中。
只测试前向走 BenchmarkCNN._eval_cnn(),测试训练全过程走 BenchmarkCNN._benchmark_cnn() 。
前面的 FLAG 解析什么的直接略过,从训练部分开始看。
_benchmark_cnn
首先构建计算图:(image_producer_ops, enqueue_ops, fetches) = self._build_model()
image_producer_ops 是处理输入数据的部分,enqueue_ops 涉及到计算图中的流水线队列,最后的 fetches 是等一下 sess.run() 中的目标 op。
设置 tf.summary 以及 tf.train.Saver 等等,Saver 中传入的是 variable_mgr.savable_variables()。
创建 tf.train.Supervisor 时同时完成变量初始化,初始化 op 组包含:
tf.local_variables_initializer初始化本地变量tf.tables_initializer初始化用到的各种表(哈希表等等)- 本地变量初始化之后,执行
variable_mgr.get_post_init_ops()完成自定义的一些初始化执行动作,这个部分要根据不同的参数维护算法来定 - 如果有同步用的队列 barrier,也一起在这里完成初始化
之后 sv.managed_session 开始真正的执行循环:
1 | with sv.managed_session(...) as sess: |
_build_model
回到第一步看一下计算图的构建部分。
(image_producer_ops, image_producer_stages) = self._build_image_processing(shift_ratio=0) 创建输入数据。
1 | 对于当前设备上的每一块 GPU,variable_mgr.create_outer_variable_scope() 创建命名域: |
如果图中用了 staging_area 的数据组织方式,这里另外再添加一下,扩充 enqueue_ops。
fetches = self._build_fetches() 最终收集前面所有的信息,构建出等一下需要传入 sess.run() 中去的目标
完成前面的内容后,把 image_producer_ops,enqueue_ops,fetches 三部分内容返回给上一层的函数。
add_forward_pass_and_gradients
创建随机数据作为输入,或者处理传入的数据产生器。
logits, aux_logits = self.model.build_network() 构建完整的前向网络。
添加输出结果以及计算 loss 误差。
variable_mgr.trainable_variables_on_device() 获取当前 GPU 上所有的可训练参数。
如果当前是最后一块 GPU 卡,那么再额外计算 L2_loss,添加到前面的 loss 中去,L2_loss 只需要计算一次。
grads = tf.gradients(scaled_loss, params, aggregation_method=aggmeth) 根据前面收集的当前 GPU 上的可训练参数信息构建反向的梯度计算图,返回得到的是图中所有的梯度。
接下来再获取一次 variable_mgr.trainable_variables_on_device() ,然后把得到的参数与前面的梯度打包在一起返回回去,准备接下来的参数更新。需要注意的是,第一次调用 trainable_variables_on_device 时传入了一个 writable=False 的参数,这里传入的是 writable=True,在某些特别的多卡参数管理算法中,用于梯度计算和最终梯度更新写回的目标是不一样的。
所有前面的这些都封装在一个 results 的 dict 中返回回去。
_build_fetches
这里算是计算图构建的收尾部分了,传入的内容是所有 GPU 上计算图的合集。
variable_mgr.preprocess_device_grads() 预处理出需要在哪些设备上执行梯度更新操作。
1 | 对于梯度更新设备中的每一块 GPU: |
把前面所有的东西打包在 fetches 这个 dict 中返回回去。
VariableMgr
可以看到上面有很多核心的操作都是通过 variable_mgr 结构完成的,这套脚本定义了一个 VariableMgr 类,想要自己修改参数管理、更新的算法只需要重写这里面的一些函数即可。
前面出现过的比较有用的几个接口函数:
- def create_outer_variable_scope(self, device_num)
封装变量命名域,主要用于维护变量创建时要做的事情,一般情况下直接返回一个普通的 tf.variable_scope,需要对变量创建进行额外操作的话需要自己构造一个 custom_getter 作为参数传入tf.variable_scope。
- def preprocess_device_grads(self, device_grads)
预处理出需要做梯度更新操作的设备,以及对应设备上的梯度和参数。
- def get_gradients_to_apply(self, device_num, gradient_state)
与上一个函数对应使用,用于找出每个设备需要处理哪些参数更新任务。
- def append_apply_gradients_ops(self, gradient_state, opt, grads, training_ops, loss_scale_params)
在设备上针对每一对需要更新的变量及其梯度,应用 apply_gradients 操作。
- def get_post_init_ops(self)
用于额外附加一些在所有变量完成初始化之后,开始训练之前,需要执行的操作。
- def get_devices(self)
返回当前节点中可用的 GPU 列表,在某些 PS-WORKER 的实现方式中,返回的是 tf.replica_device_setter 的封装。
- def savable_variables(self)
返回哪些变量是需要被 tf.Saver 保存进检查点的。
- def trainable_variables_on_device(self, rel_device_num, abs_device_num, writable=False)
返回当前设备上的可训练参数(即能计算梯度,可以进行反向更新的参数)。输入的两个 device_num 分别是 GPU 在当前节点中的编号以及在全局环境中的编号。
writable 用于标识需要被写回更新的参数,在有些情况下图中可能存在多份参数备份,writable 为 False 时返回的是图中用于求梯度以及构建反向数据通路用的参数,为 True 时返回的是等一下 apply_gradients 需要应用梯度更新操作的参数。
replica_device_setter & variable_scope-custom_getter
前面建图时用到的两个很重要的接口,用于额外处理 op 在设备上的分配操作。
benchmarks 脚本中的用法大概是这样:
1 | for device_num in range(len(self.devices)): |
对节点中的每一块 GPU 卡,首先套上一个 variable_scope(里面可能会使用到 custom_getter),在构建 op 时再套一层 replica_device_setter。
tf.replica_device_setter 需要配合 tf.device 使用,作用范围是其 python 作用域以内的所有 op,这个函数简单地说就是对传入的 op 进行判断,如果是计算型的 op 就正常分配在运算设备上,如果是需要在 PS-WORKER 之间共享的参数型 op 则需要在参数服务器上。它的返回值是需要分配给的 device 的名字,所以直接用 tf.device 指定即可。
1 | def replica_device_setter(ps_tasks=0, ps_device="/job:ps", |
具体的源码实现上,主要是对新创建 op 的类型进行判断,如果在 ps_ops 包含的范围内(为 None 时会用一个 STANDARD_PS_OPS 来作为检查范围)则用某种 ps 分配策略放到参数服务器上,否则放到默认的计算设备上。
默认的 ps_strategy 不指定的话就是用的 round-robin,简单地说就是按顺序依次分。
tf.variable_scope 中 custom_getter 的作用范围就只限于作用域以内所有的 tf.get_variable 调用了(注意,必须是 tf.get_variable,这个对 tf.variable 是无效的)。前面 replica_device_setter 只是指定了参数存放的位置,这里则可以对参数创建进行更多的改动。
例如 StagedVariableGetter 做的事情就是把变量封装上一层 StagingArea,计算图中需要读取变量的时候返回一个 StagingArea.get,对于 apply_gradient 这种需要修改变量本身的操作,则返回参数本体(也就是前面看到的 writable 这个参数起作用的方式)。
VariableMgr instances
官方的 Benchmark 脚本中提供了 8 种内置的 VariableMgr 实例。
VariableMgrIndependent
不同卡之间完全不作数据交互,单纯用来测单机多卡的理论计算速度用。
不需要封装 custom_getter 和 replica_device_setter。
VariableMgrLocalFetchFromPS
多卡中的参数统一存储,不同卡在计算时直接从统一的 PS 中读取需要的数据。
不需要封装 custom_getter。
get_device 这里:
1 | if self.benchmark_cnn.local_parameter_device_flag == 'gpu': |
如果参数存放在 CPU 上,直接对每个 GPU 设备返回一个指定好 ps_device 的 replica_device_setter。
如果选择参数存放在 GPU 上,这里的做法是将所有参数均衡负载平分在各块卡上。
VariableMgrLocalFetchFromStagedPS
多卡中的参数统一存储,相比之前的增加了 StagingArea 的流水线操作。
custom_getter 中为每个变量额外创建了一个 StagingArea,计算图中需要读取变量的时候返回对应的 StagingArea.get。
trainable_variables_on_device 中 writable 为 True 时,返回变量本体,否则返回对应的 StagingArea.get。
其他部分与上一种方式相同。
VariableMgrLocalReplicated
每块卡上的计算图完全独立,各卡都是自己存储自己的参数,梯度更新的时候再采用某种 Allreduce 的算法对各卡上的参数做统一规约。
get_post_init_ops 在初始化完成后拷贝 GPU0 上的参数到其他卡上覆盖掉,保证所有卡的初始参数一致。
不需要封装 custom_getter 和 replica_device_setter。
preprocess_device_grads 中返回的梯度是调用某种规约算法去综合所有卡上的梯度值,之后再跟本地的参数一起交给 apply_gradient 去更新即可。
因此这里的计算流程是,初始所有卡上参数一致,训练完一步之后规约梯度,规约完成后所有卡上得到的梯度也都一致了,再 apply 更新到本地的卡上,这样下一步开始时所有卡上的参数仍然是一致的。
VariableMgrDistributedAllReduce
用于分布式。
这是脚本中唯一一种需要用到 single_session 的模式,基本上跟 Replicated 的方式一致,每块卡上都独立存数据,更新时全局规约,特殊点在于这种方式只需要由一个 python 进程来启动,所有 worker 上的图构造等等都是由一个 controller 的角色完成,其他所有的 worker 都像平时的 ps 一样 join_server 即可。
大体实现上跟上一种一致
VariableMgrDistributedFetchFromPS
用于分布式。
大体实现跟单节点的 FetchFromPS 一致。
custom_getter 使用了 OverrideCachingDevice,虽然由 replica_device_setter 指定好了所有参数都保存在 ps 上,但是在 worker 还可以做一次数据缓存。caching_device 这个参数与 tf.get_variable() 中的参数对应,即 worker 端的多块卡从远程 ps 获取数据只在第一块卡拉取数据时通过网络取一次,后续的几次直接从缓存中读取。缓存数据的分配方案跟单节点 ps 时 CPU/GPU 上存储参数的方案类似。
VariableMgrDistributedFetchFromStagedPS
用于分布式。
在上一种的基础上加上了 StagingArea。
VariableMgrDistributedReplicated
用于分布式。
计算流程其实跟 DistributedAllReduce 是一致的,大体上跟前面类似实现相一致。